








近日,中國科學院沈陽自動化研究所與英國愛丁堡機器人中心合作研究取得新進展,提出了一種在動態(tài)、非結(jié)構(gòu)環(huán)境下基于深度強化學習的移動機械臂自主作業(yè)方法,將最新的人工智能學習理論成功應用于真實的復雜移動機械臂控制。相關(guān)研究成果發(fā)表于期刊Sensors。
機器人在空間、陸地和水下等大量動態(tài)、非結(jié)構(gòu)環(huán)境下作業(yè)是一個復雜的任務,相比于傳統(tǒng)工業(yè)機器人作業(yè)要求更高,通常需要機器人具有感知、導航、決策、操作等多種功能。
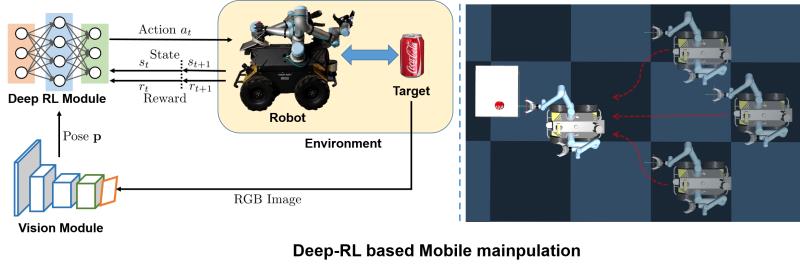
沈陽自動化所與愛丁堡機器人中心科研團隊聯(lián)合利用神經(jīng)網(wǎng)絡構(gòu)建了一種機器人整體強化學習控制模型,采用深度學習方法對機器人相機獲得的環(huán)境與目標信息進行處理,然后將感知信息與機器人當前狀態(tài)作為系統(tǒng)輸入,對機器人的整體行為進行自主控制。通過仿真與實際環(huán)境中的交互學習與訓練,最終實現(xiàn)了在真實環(huán)境下的移動機械臂自主作業(yè),為深度強化學習應用于更為復雜的水下浮游基座機器人系統(tǒng)開展自主作業(yè)研究奠定了基礎。
在依托于沈陽自動化所的機器人學國家重點實驗室與愛丁堡機器人中心的戰(zhàn)略合作框架(MoU)下,雙方積極開展人員互訪、學術(shù)交流及研究生聯(lián)合培養(yǎng),并在多個研究領域開展合作,包括基于深度強化學習的機器人控制、基于視覺的水下三維場景重建與目標識別、水下機器人自主作業(yè)等。隨著合作的深入與加強,后續(xù)將會持續(xù)產(chǎn)出更多科研成果,促進雙方相關(guān)科研共同進步。
沒有賬號?請注冊會員






